


PLC在蒸汽锅炉汽包液位PID控制系统的应用分析
|
1 引言 工业蒸汽锅炉汽包水位控制的任务是控制给水流量使其与蒸发量保持动态平衡,维持汽包水位在工艺允许的范围内,是保证锅炉安全生产运行的必要条件,也是锅炉正常生产运行的主要指标之一。若水位过高,影响汽水分离的效果,使用气设备发生故障;而水位过低则会破坏汽水循环,严重时导致锅炉爆炸,所以锅炉汽包水位必须严加控制。为了确保锅炉生产的稳定、可靠和经济运行,我们设计采用了性能先进的永宏FBs-PLC、变频调速器、计算机应用等自动化设备组成的锅炉PID自动控制系统。该控制系统通过检测水汽压力、温度,汽包液位等运行物理量,在运行过程中全自动调节,保证了工业锅炉的安全稳定高效运行。 2 工业锅炉相关工艺介绍 蒸汽锅炉是厂矿重要的动力设备,其任务是供给合格稳定的蒸汽,以满足负荷的需要。为此,锅炉生产过程的各个主要参数都必须严格控制。而利用余热气体作为热交换介质的余热锅炉在全国占有很大的比例,其节能降耗效果尤为明显。某化工厂硫酸余热锅炉就是利用沸腾炉出来的炉气(主要是SO2)温度过高,将其作为热交换对象,通过余热锅炉副产中压蒸汽供各生产分厂使用,既保证了生产需要,也达到了节能降耗的目的。锅炉是一个较为复杂的调节对象,为保证提供合格的蒸汽以适应负荷的需要,与其配套设计的控制系统必须满足各主要工艺参数的需要。余热锅炉工艺流程如图1所示。 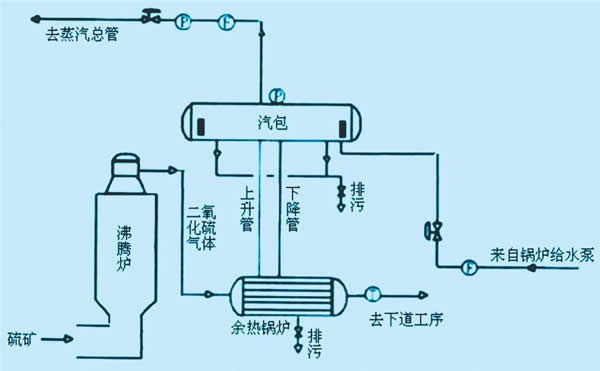
3 控制难点分析 锅炉计算机控制是近年来开发的一项新技术。它是微型计算机软、硬件、自动控制、锅炉节能等几项技术紧密结合的产物,作为锅炉控制装置,其主要任务是保证锅炉的安全、稳定、经济运行,减轻操作人员的劳动强度。采用微计算机控制,能对锅炉进行过程的自动检测、自动控制等多项功能。它的被调量是汽包水位,而调节量则是给水流量,通过对给水流量的调节,使汽包内部的物料达到动态平衡,变化在允许范围之内,虽然锅炉汽包水位对蒸气流量和给水流量变化的响应呈积极特性,但是在负荷(蒸气流量)急剧增加时,表现却类似逆响应特性,即所谓的虚假水位。造成这一原因是由于负荷增加时,导致汽包压力下降,使汽包内水的沸点温度下降,水的沸腾突然加剧,形成大量汽泡,而使水位抬高。汽包水位控制系统,实质上是维持锅炉进出水量平衡的系统。它是以水位作为水量平衡与否的控制指标,通过调整进水量的多少来达到进出平衡,将汽包水位维持在汽水分离界面最大的汽包中位线附近,以提高锅炉的蒸发效率,保证生产安全。由于锅炉水位系统是一个设有自平衡能力的被控对象,运行中存在虚假水位现象,实际应用中可根据情况采用水位单冲量、水位蒸汽量双冲量和水位、蒸汽量、给水量三冲量的控制系统。所谓三冲量调节系统就是把给水流量W,汽包水位H,蒸汽流量D三个变量通过运算后调节给水阀的调节系统。具体调节过程方框图如图2所示。
先通过蒸汽流量变送器和给水流量变送器取得各自的信号乘以相应的比例系数,通过比例系数可以调节蒸汽流量或给水流量对调节系统的影响力度。通过差压变送器取得水位信号作为主调节信号H。如果水位设定值为G,那么在平衡条件下应有D×Dk-W×Wk+H-G=0的关系式存在。其中Dk为蒸汽流量系数 Wk为给水流量系数。如果再设定时,保证在稳态下D×Dk=W×Wk那么就可以得到H=G。此时调节器的输出就与符合对应,给水阀停在某一位置上。若有一个或多个信号发生变化,平衡状态被破坏,PI调节模块的输出必将发生变化。当水位升高了,则调节模块的输出信号就减小,使得给水调节阀关小。反之,当水位降低时,调节模块的输出值增大,使给水阀开大。实践证明三冲量给水单极自动调节系统能保持水位稳定,且给水调节阀动作平稳。锅炉给水系统中还有一个比较重要的控制回路是给水压力回路,因为汽包内压力较高,要给锅炉补水必须提供更高的压力,给水压力回路的作用是提高水压,使水能够正常注入汽包。但在蒸汽流量未达到满负荷时,对给水流量的要求也不高。在老式的锅炉系统中一般采用给水泵一直以工频方式运转,用回流阀降低水压防止爆管,现在一般采用通过变频器恒压供水的方式控制水压。锅炉给水量通过汽包液位调节。汽包液位测量选用浮筒液位计。为有效利用转换废热,降低消耗,减低劳动强度,有利于整体工艺稳定,要求汽包液位自动控制,正常生产时波动应小于±5%。PID调节蒸汽出口阀可以很好的控制汽包压力。开车正常后波动范围不大,可以不考虑。转化负荷波动、出预热器锅炉给水温度变化、锅炉负荷波动、排污量变化这几个因素对汽包液位的影响必须考虑。以汽包液位为主调参数、以给水流量为副调参数、以蒸汽流量为前馈,但调节效果很差。引起汽包液位的大起大落。考虑到该废热锅炉控制参数耦合小,流程简单,产汽量也较稳定,我们从操作人员的操作中得到启发,认为减少给水量的波动从而稳定给水温度成为该废热锅炉液位控制的要点。因此我们选用“以汽定水+液位前馈”比值控制方案,方案框图如图3所示。
其中系数K为汽水损失率(给水流量与蒸汽流量的比值),范围为1.1~1.2。PID参数为P=300%、I=0.4、D=0。这组PID参数可以使阀位波动幅度不大而回路有较快的跟踪效果。液位前馈系数与锅炉额定负荷密切相关,一般是额定负荷越大前馈系数也越大。本项目废热锅炉的额定负荷为35t/h。前馈系数按表一给定,见附表:
4.1 带PID控制功能的FATEK可编程控制器
4.2 汽包水位PID控制设计优点 (1) 减少干扰对主回路的影响,可由副回路控制器予以校正。
根据应用要求,用户将PID 控制器设定成比例+积分+微分控制器,其控制器的数字化数学表达式如下: 加上微分项的控制器,目的在于消除程控系统的过度反应,进而使程控系统能够平稳缓和达到稳定。虽然微分项有上述优点,但因其对输出量的贡献相当灵敏,大部分的应用不必使用微分项而将Td设定为0。PID控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。PID控制器参数整定的方法很多,概括起来有两大类:一是理论计算整定法。它主要是依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。三种方法各有其特点,其共同点都是通过试验,然后按照工程经验公式对控制器参数进行整定。但无论采用哪一种方法所得到的控制器参数,都需要在实际运行中进行最后调整与完善。现在一般采用的是临界比例法。利用该方法进行PID控制器参数的整定步骤如下: (1) 首先预选择一个足够短的采样周期让系统工作; 除此以外为保证锅炉运行的安全,在进行自动化控制系统设计时,对锅炉水位、锅炉汽包压力等重要参数应设置常规仪表及报警装置,以保证水位和汽包压力有双重甚至三重报警装置,这是必不可少的,以免锅炉发生重大事故。 5 结束语 由于采用了PLC进行控制,系统功能完善,结构先进合理,能耗小,扩展灵活,便于维护,并且可靠性高,而且还极大地提高了企业的生产效率和经济效益。该系统自动化程度较高,大大降低了操作者劳动强度,降低了成本,经过近2年的运行,用户给予了很高评价,认为利用国产永宏PLC开发的控制系统功能完善,综合性强,人机界面友好,实用性好。随着国产优秀可编程控制器和高速计算元件的快速发展,锅炉控制系统将会更加完善。 |
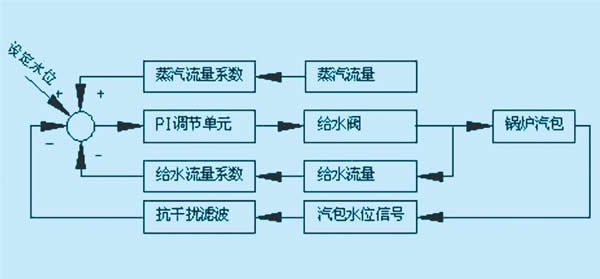
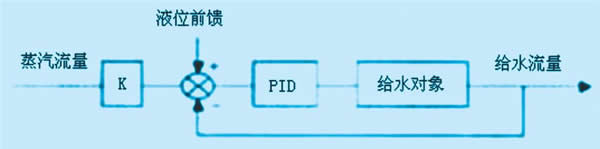
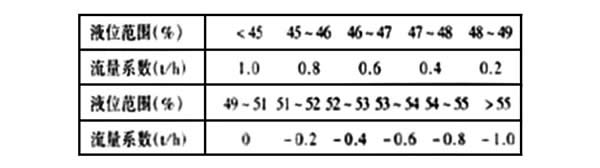

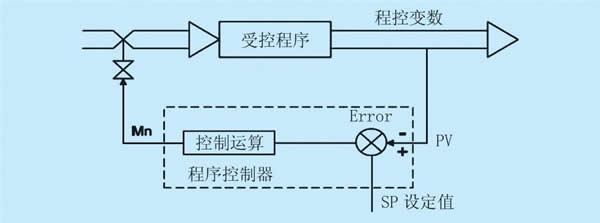 图6 典型闭环回路程控示意图
图6 典型闭环回路程控示意图